(via P6230816.jpg (4288×3216))

(via p6230816.jpg (4288×3216))
More Posts from Hq-tech and Others


How the brake cooling system works in a F1 car (640 x 360).
Source: https://openpics.aerobatic.io/
![Titanium Oxide Coated Endmill [2000x2000]](https://64.media.tumblr.com/fbda172d5e5d29a4f4416d58f0c4356a/tumblr_omqso4erc31ujyzsuo1_500.jpg)
Titanium Oxide Coated Endmill [2000x2000]
Source: https://openpics.aerobatic.io/

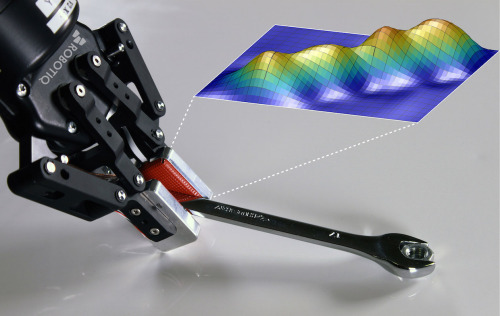
Why Tactile Intelligence Is the Future of Robotic Grasping
This is a guest post. The views expressed here are solely those of the author and do not represent positions of IEEE Spectrum or the IEEE.
The simple task of picking something up is not as easy as it seems. Not for a robot, at least. Roboticists aim to develop a robot that can pick up anything—but today most robots perform “blind grasping,” where they’re dedicated to picking up an object from the same location every time. If anything changes, such as the shape, texture, or location of the object, the robot won’t know how to respond, and the grasp attempt will most likely fail.
Robots are still a long way off from being able to grasp any object perfectly on their first attempt. Why do grasping tasks pose such a difficult problem? Well, when people try to grasp something they use a combination of senses, the primary ones being visual and tactile. But so far, most attempts at solving the grasping problem have focused on using vision alone.
IEEE Spectrum

@ollie_da_red fabricated a new stand for my #haybudden. It’s ridiculously more solid than the stand I was using and I have better standing/working clearance. Can’t wait to put it to use. I welded the locating tabs on top this evening (#worldsworstwelder) but all of Paddy’s work is tip top. #blacksmith #anvilstand #fabricator #craft #tiptop #ohdamnitsheavy #205collaborative #greensboronc (at 205 Collaborative)

A well used inside micrometer
Source: https://imgur.com/js550IJ

Sam Steel by Neil Kremer on Flickr.

-
 the-enfield-anomaly liked this · 1 year ago
the-enfield-anomaly liked this · 1 year ago -
 blancpain1735-fan-luxembourg liked this · 1 year ago
blancpain1735-fan-luxembourg liked this · 1 year ago -
 northwetukbim liked this · 1 year ago
northwetukbim liked this · 1 year ago -
 superthorgrem liked this · 1 year ago
superthorgrem liked this · 1 year ago -
 muppetlolly reblogged this · 1 year ago
muppetlolly reblogged this · 1 year ago -
muppetlolly liked this · 1 year ago
-
idonotliketheconeofshamesblog liked this · 1 year ago
-
 ausevor reblogged this · 1 year ago
ausevor reblogged this · 1 year ago -
ausevor liked this · 1 year ago
-
stuff1017 liked this · 1 year ago
-
 pocord14 liked this · 1 year ago
pocord14 liked this · 1 year ago -
 dn-a001 liked this · 1 year ago
dn-a001 liked this · 1 year ago -
 expendablemudge liked this · 1 year ago
expendablemudge liked this · 1 year ago -
 walt104158 liked this · 1 year ago
walt104158 liked this · 1 year ago -
 steviedegrae liked this · 1 year ago
steviedegrae liked this · 1 year ago -
 stareandcompaire reblogged this · 1 year ago
stareandcompaire reblogged this · 1 year ago -
 reallydeafeningnacho liked this · 1 year ago
reallydeafeningnacho liked this · 1 year ago -
 mildly-hallucinogenic-toreador liked this · 1 year ago
mildly-hallucinogenic-toreador liked this · 1 year ago -
 jawbones4u reblogged this · 1 year ago
jawbones4u reblogged this · 1 year ago -
jawbones4u liked this · 1 year ago
-
 niftyandinterestingstuff reblogged this · 1 year ago
niftyandinterestingstuff reblogged this · 1 year ago -
niftyandinterestingstuff liked this · 1 year ago
-
 rollerman1 liked this · 9 years ago
rollerman1 liked this · 9 years ago -
 hq-tech reblogged this · 9 years ago
hq-tech reblogged this · 9 years ago -
 pitchers-0-stuff reblogged this · 9 years ago
pitchers-0-stuff reblogged this · 9 years ago -
pitchers-0-stuff liked this · 9 years ago
-
 megafreshsuit reblogged this · 9 years ago
megafreshsuit reblogged this · 9 years ago