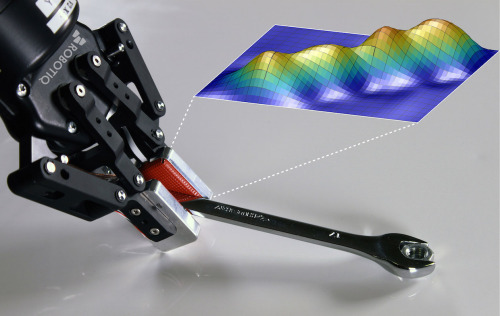
Titanium Oxide Coated Endmill [2000x2000]
![Titanium Oxide Coated Endmill [2000x2000]](https://64.media.tumblr.com/fbda172d5e5d29a4f4416d58f0c4356a/tumblr_omqso4erc31ujyzsuo1_500.jpg)
Titanium Oxide Coated Endmill [2000x2000]
Source: https://openpics.aerobatic.io/
More Posts from Hq-tech and Others
Why Tactile Intelligence Is the Future of Robotic Grasping
This is a guest post. The views expressed here are solely those of the author and do not represent positions of IEEE Spectrum or the IEEE.
The simple task of picking something up is not as easy as it seems. Not for a robot, at least. Roboticists aim to develop a robot that can pick up anything—but today most robots perform “blind grasping,” where they’re dedicated to picking up an object from the same location every time. If anything changes, such as the shape, texture, or location of the object, the robot won’t know how to respond, and the grasp attempt will most likely fail.
Robots are still a long way off from being able to grasp any object perfectly on their first attempt. Why do grasping tasks pose such a difficult problem? Well, when people try to grasp something they use a combination of senses, the primary ones being visual and tactile. But so far, most attempts at solving the grasping problem have focused on using vision alone.
IEEE Spectrum
![Apposed Cylinder Aircraft Engine [potato Quality] [1600 × 1200]](https://64.media.tumblr.com/dfc593b788f4207a9d1b8fb9903e66d5/tumblr_onn0mzIiWD1ujyzsuo1_500.jpg)
Apposed cylinder aircraft engine [potato quality] [1600 × 1200]
Source: https://openpics.aerobatic.io/
![Volkswagen 2.0L Turbo Diesel Injection Engine [4709x3140]](https://64.media.tumblr.com/44392d2f4d4680a116195b3efc85144b/tumblr_on90gwC9Yy1ujyzsuo1_500.jpg)
Volkswagen 2.0L Turbo Diesel Injection Engine [4709x3140]
Source: https://openpics.aerobatic.io/



12 Cylinder motion
![An Inertia Switch From A Fuel Pump Circuit [1836x3264]](https://64.media.tumblr.com/cf499c892833bd72b0f0ae56b97817da/tumblr_oqv7hpDccd1ujyzsuo1_640.jpg)
An inertia switch from a fuel pump circuit [1836x3264]
Source: https://openpics.aerobatic.io/




BMW F30 M3 + F32 M4 Engine Components (S55B30)


15.06.30

-
 cavallopazzos-stuff liked this · 3 years ago
cavallopazzos-stuff liked this · 3 years ago -
 karlystopper reblogged this · 4 years ago
karlystopper reblogged this · 4 years ago -
 leonard5565 liked this · 5 years ago
leonard5565 liked this · 5 years ago -
alexxandro-mz liked this · 5 years ago
-
 guardyaningxs-blog liked this · 6 years ago
guardyaningxs-blog liked this · 6 years ago -
shadowystudentpaperworld reblogged this · 7 years ago
-
 hq-tech reblogged this · 8 years ago
hq-tech reblogged this · 8 years ago