300 Ton Crankshaft In The World’s Biggest And Strongest Diesel Engine (109,000HP) [429x643]
![300 Ton Crankshaft In The World’s Biggest And Strongest Diesel Engine (109,000HP) [429x643]](https://64.media.tumblr.com/ec68a623aa8a18b0bf8474e3a63a9460/tumblr_on63vnj7ak1ujyzsuo1_500.png)
300 Ton Crankshaft in the World’s Biggest and Strongest Diesel Engine (109,000HP) [429x643]
Source: https://openpics.aerobatic.io/
More Posts from Hq-tech and Others

Constant-velocity joints (aka homokinetic or CV joints) allow a drive shaft to transmit power through a variable angle, at constant rotational speed, without an appreciable increase in friction or play. They are mainly used in front wheel drive vehicles, and many modern rear wheel drive cars with independent rear suspension typically use CV joints at the ends of the rear xle halfshafts and increasingly use them on the propshafts (drive shafts).

Torino 380w Nurburgring - 1969

(via 14481d1249681551-vintage-shop-cart-p2120307-medium-.jpg (800×600))
![A/C Compressor Prius II [2205×1560]](https://64.media.tumblr.com/a8b05d9a31e57f5494f71aaba4db7761/tumblr_olk8iaNEEu1ujyzsuo1_500.jpg)
A/C Compressor Prius II [2205×1560]
Source: https://openpics.aerobatic.io/


Rivet. Rivet.
Tech art





by Atsushi Koyama, via io9.


Door in Abandoned Factory | unknown credit
(via Pinterest • The world’s catalog of ideas)
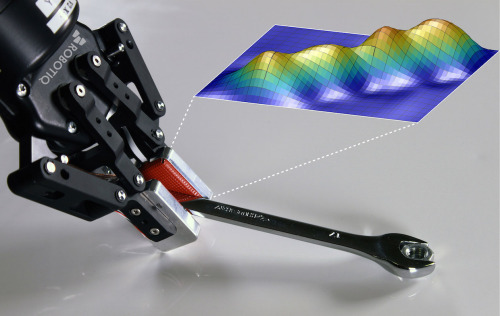
Why Tactile Intelligence Is the Future of Robotic Grasping
This is a guest post. The views expressed here are solely those of the author and do not represent positions of IEEE Spectrum or the IEEE.
The simple task of picking something up is not as easy as it seems. Not for a robot, at least. Roboticists aim to develop a robot that can pick up anything—but today most robots perform “blind grasping,” where they’re dedicated to picking up an object from the same location every time. If anything changes, such as the shape, texture, or location of the object, the robot won’t know how to respond, and the grasp attempt will most likely fail.
Robots are still a long way off from being able to grasp any object perfectly on their first attempt. Why do grasping tasks pose such a difficult problem? Well, when people try to grasp something they use a combination of senses, the primary ones being visual and tactile. But so far, most attempts at solving the grasping problem have focused on using vision alone.
IEEE Spectrum
-
 cavallopazzos-stuff liked this · 3 years ago
cavallopazzos-stuff liked this · 3 years ago -
 karlystopper reblogged this · 4 years ago
karlystopper reblogged this · 4 years ago -
 fast68pony reblogged this · 5 years ago
fast68pony reblogged this · 5 years ago -
fast68pony liked this · 5 years ago
-
alexxandro-mz reblogged this · 5 years ago
-
alexxandro-mz liked this · 5 years ago
-
 guardyaningxs-blog liked this · 6 years ago
guardyaningxs-blog liked this · 6 years ago -
shadowystudentpaperworld reblogged this · 7 years ago
-
 gaticosycosicas liked this · 8 years ago
gaticosycosicas liked this · 8 years ago -
 plasticpaddypogue reblogged this · 8 years ago
plasticpaddypogue reblogged this · 8 years ago -
 shamedintoleaving liked this · 8 years ago
shamedintoleaving liked this · 8 years ago -
 imcoolbreeze1 reblogged this · 8 years ago
imcoolbreeze1 reblogged this · 8 years ago -
 jctea reblogged this · 8 years ago
jctea reblogged this · 8 years ago -
yoursisnodisgrace reblogged this · 8 years ago
-
 scconfederate liked this · 8 years ago
scconfederate liked this · 8 years ago -
 queenfrau liked this · 8 years ago
queenfrau liked this · 8 years ago -
 beachedseafarer reblogged this · 8 years ago
beachedseafarer reblogged this · 8 years ago -
 docfotcho reblogged this · 8 years ago
docfotcho reblogged this · 8 years ago -
docfotcho liked this · 8 years ago
-
 hq-tech reblogged this · 8 years ago
hq-tech reblogged this · 8 years ago